 LinkedIn
LinkedIn
 GitHub
GitHub


Resume

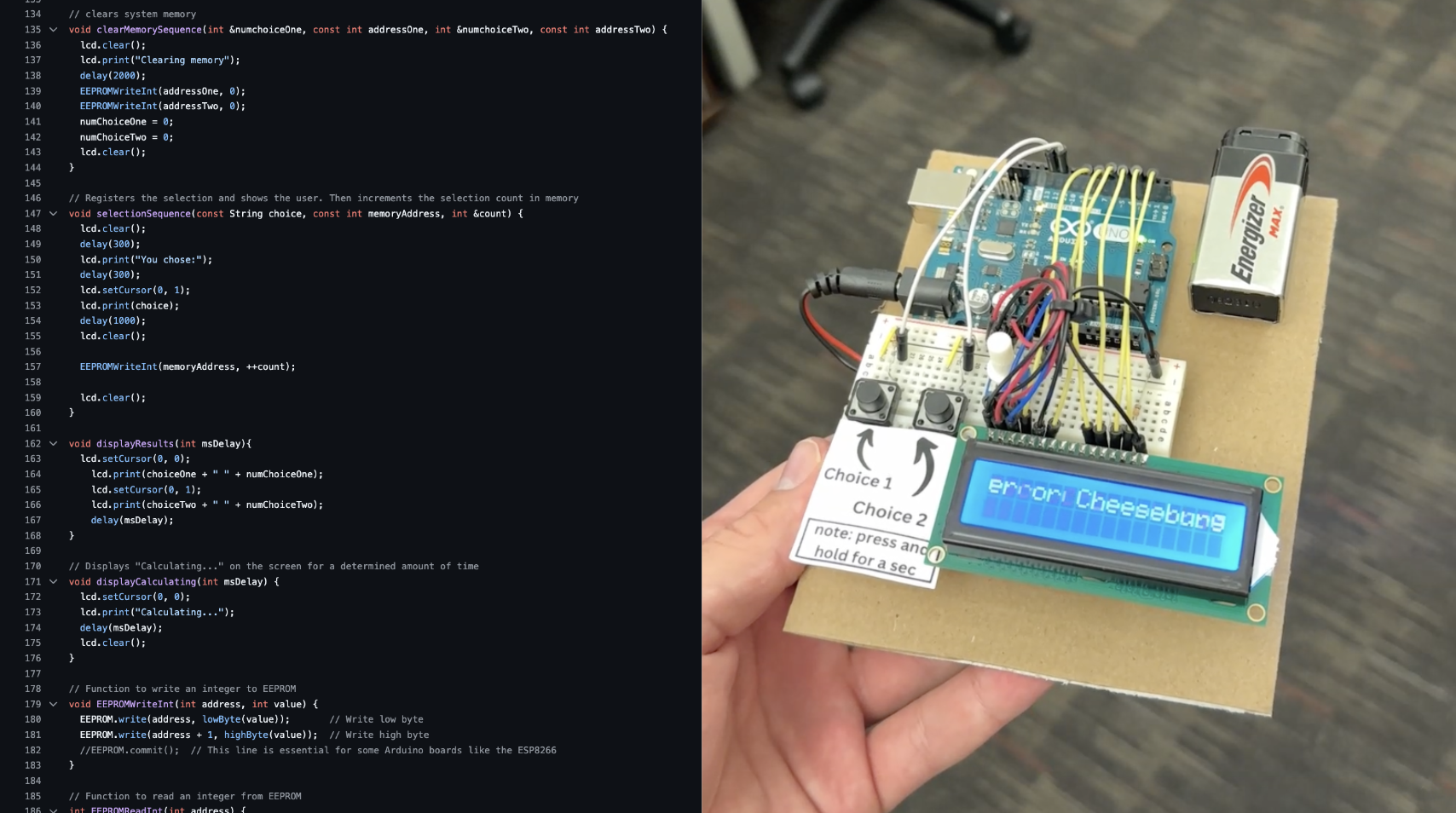
Foreflight
Software Engineering Intern
At Foreflight, I worked alongside full-time engineers to design and develop internal software for user-data publisher infrastructure.
+ Developed production code in Swift, Java, and Objective-C.
+ Demonstrated rapid proficiency in the Apple Development environment for both front-end and back-end development.
+ Practiced agile best-practices, participated in a PR workflow, and wrote automated tests for all code.
+ Contributed effectively and knowledgeably to conceptual system design discussions.
NASA
Research Intern
At NASA, I co-authored a research publication and served a role providing quantatative metrics on classified satelite data.
+ Analyzed millions of datapoints in classified NASA satelite datasets using JavaScript and Python.
+ Contributed meaningfully to an original research paper investigating the El Niño/La Niña Phenomenon.
+ Developed additional graphics and animations to visualize the team's discoveries in presentation materials.
+ Co-presented our paper at the AGU Scientific Conference.
View the abstract of our paper here.

USC Racing
Head Software Engineer
As part of USC's Formula SAE project design team, I manage all custom software on our formula racing car.
+ Designed, constructed, and wrote code for a custom driver dashboard interface in C++ utilizing CAN networking.
+ Developed custom ECU firmware to satisfy strict competition safety guidelines.
+ Tested and documented hundreds of components on the car's wiring harness in RapidHarness CAD software.
+ As driver: Comprehensive knowledge of car and mental agility to perform in high-stakes environments.
Learn about the team here.

Competition Robotics
Autonomous Software Specialist
Responsible for all autonomous software and utilized advanced techniques to succeed in global competition.
+ Responsible for all autonomous software and sensors on robot. Ranked 3rd in world for autonomous control.
+ Utilized advanced techniques: sensor fusion localization, computer vision, and object tracking for 100% of autonomous control period.
+ Designed a unique autonomous path that accurately traverses variable terrain using computer vision, giving our team a distinct advantage.
+ Served in community STEM outreach efforts - FRC 2468 earned top 6 in the world (finalists) for Impact Award.
FRC 2468 is a globally recognized program in competition robotics.